모터 작동시키기
3D 펜에서 재료를 밀어내는 역할을 하는 모터를 작동시켜 보려합니다.
이전에 배운 버튼을 이용해서, 각 버튼이 눌렸을 때, 모터가 회전되도록 구현하는 것이 목표입니다.

모터가 돌아가는 것은 아래쪽에서 확인할 수 있습니다.
이 모터는 DC 모터로 드라이버에 의해 제어됩니다.
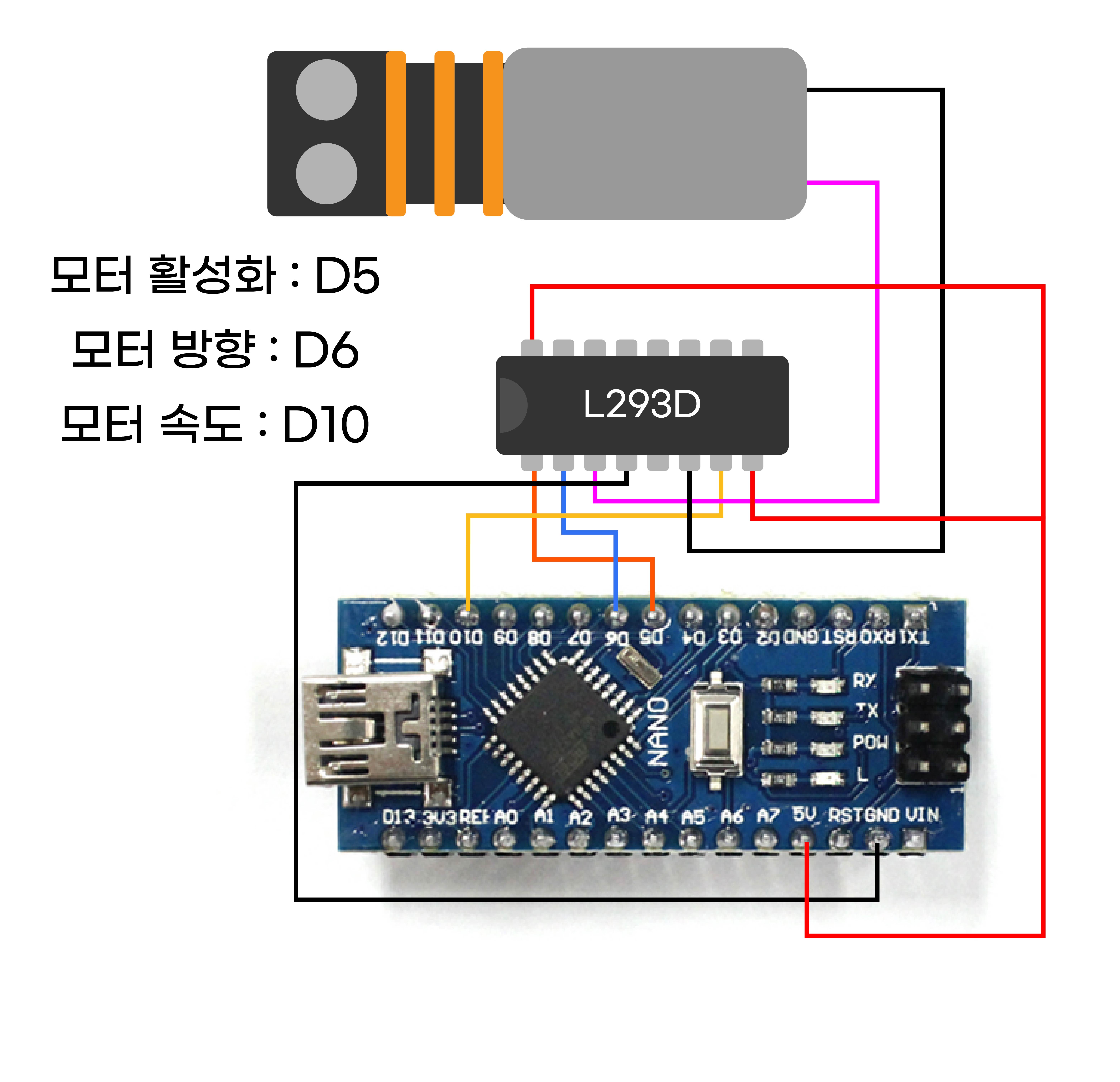
그림이 약간 복잡합니다. L293D는 모터의 속도와 방향을 제어하게 해주는 모터 드라이버입니다. 이 부품이 어떤 부품인지 이해하기에는 난이도가 있으니 필요한 부분만 살펴보도록 하겠습니다.
모터 활성화, 모터 방향, 모터 속도에 관한 부분만 확인하면 됩니다.
그림에도 표시되어 있듯이 각각 디지털 핀 5,6,10 입니다.
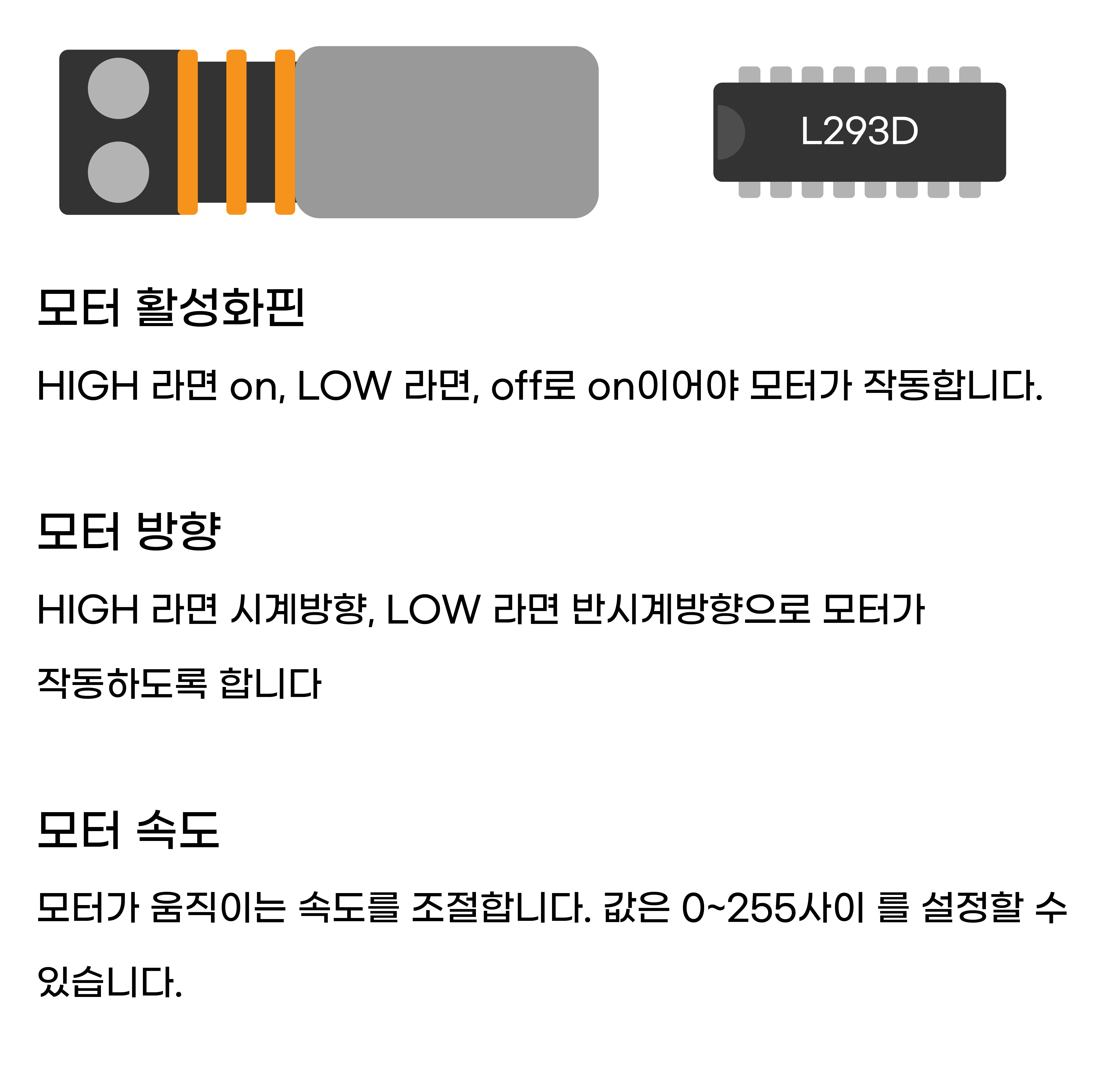
모터를 L293D로 작동시키려면, 먼저 모터 활성화가 되어야 하고, 방향을 정하고, 모터의 속도를 정해주어야 합니다.
모터 활성화가 되어 있지 않고, 되어 있더라도 모터의 속도가 0이면, 모터는 움직이지 않습니다.
모터를 작동시키려면 먼저 3개의 핀을 모두 OUTPUT(출력)으로 설정해주어야 합니다.
이전 단계에 작성한 코드를 그대로 사용해서, 추가로 코드를 작성해봅니다.
void setup() {
// put your setup code here, to run once:
pinMode(8,INPUT_PULLUP);
pinMode(7,INPUT_PULLUP);
pinMode(5,OUTPUT);
pinMode(6,OUTPUT);
pinMode(10,OUTPUT);
pinMode(13,OUTPUT);
digitalWrite(5, HIGH);
}
void loop() {
// put your main code here, to run repeatedly:
if(digitalRead(8)==LOW)
{
digitalWrite(13,HIGH); //LED ON
}
else if(digitalRead(7)==LOW)
{
digitalWrite(13,LOW); //LED OFF
}
}
pinMode 는 처음 한번만 호출되면 됨으로 setup에 작성합니다. 5,6,10 모두 OUTPUT으로 설정합니다.
setup의 digitalWrite(5,HIGH)는 모터 활성화 핀의 출력을 HIGH로 설정합니다.
전원이 on 되면 모터는 항상 활성화가 되어 있게 됩니다. (모터 활성화 핀을 ROW로 하는 코드가 없기 때문)
이어서 모터의 방향보다 모터의 속도 먼저 설정해보도록 코드를 작성해봅니다.
void setup() {
// put your setup code here, to run once:
pinMode(8,INPUT_PULLUP);
pinMode(7,INPUT_PULLUP);
pinMode(5,OUTPUT);
pinMode(6,OUTPUT);
pinMode(10,OUTPUT);
pinMode(13,OUTPUT);
digitalWrite(5, HIGH);
}
void loop() {
// put your main code here, to run repeatedly:
if(digitalRead(8)==LOW)
{
digitalWrite(13,HIGH); //LED ON
analogWrite(10,100);
}
else if(digitalRead(7)==LOW)
{
digitalWrite(13,LOW); //LED OFF
analogWrite(10,0);
}
}
analogWrite 라는 함수가 처음 등장했습니다. 분명 디지털 10핀인데 아날로그 관련된 함수를 사용합니다.
이해가 안가는 부분이 생겼습니다. 여기에서 analogWrite 함수는 디지털 핀중에 PWM이라는 핀이 있습니다.
우리가 사용하는 아두이노 나노 보드에는 3, 5, 6, 9, 10, 11의 디지털핀이 해당됩니다.
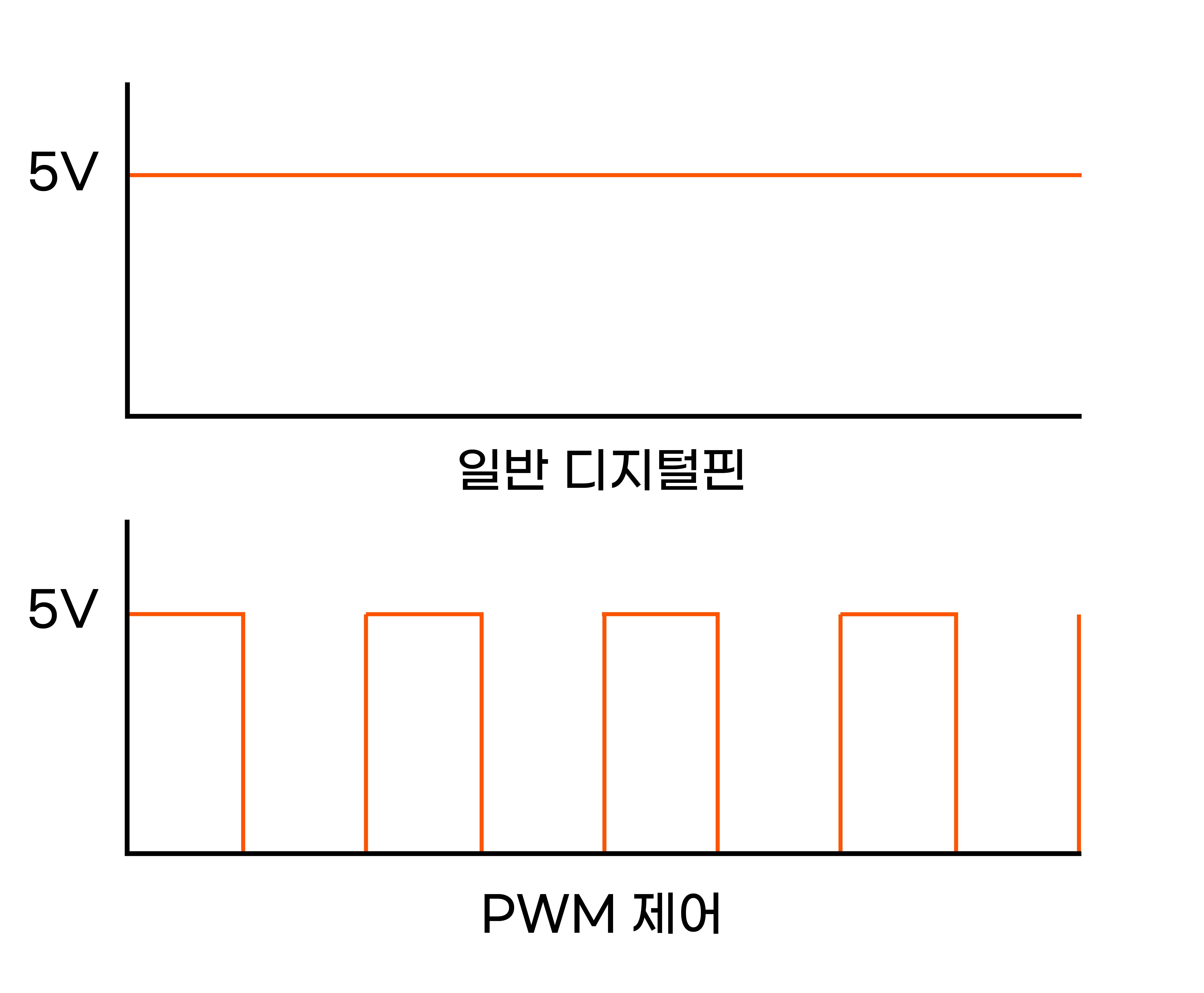
일반 디지털 핀의 제어는 위와 같이 5V를 쭉 출력하여 모터속도가 최대로 유지`되는 반면, PWM은 짧은 시간에 5v로 이동했다가 0v로 이동을 반복함으로써 전류를 적게 보내주고, :blackbold:`모터속도가 줄어들면서 제어 할 수있습니다.
즉, 일반 디지털 핀은 모터를 최대속도이거나 정지된 상태만 제어할 수 있다면, PWM 제어는 모터를 중간속도로도 설정할 할 수 있습니다.
그 PWM로 제어하게 하는 함수가 analogWrite 입니다.
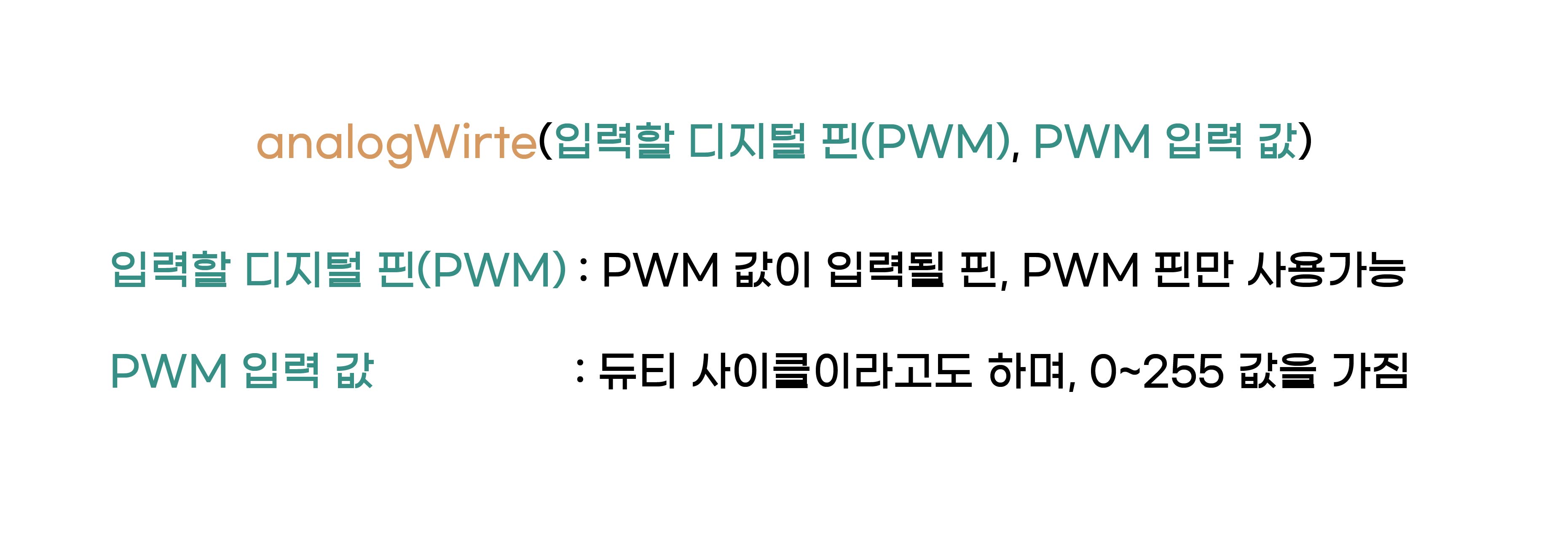
analogWrite 에는 PWM 이 지원되는 디지털핀만 사용이 가능합니다. PWM 값은 보통 0은 최소로 0V, LOW와 같고, 255는 최대로 5V, HIGH와 같습니다.
하지만 모터 방향과 함께 사용할 때는 값을 변화를 줘야 합니다. 자세한 내용은 아래쪽에서 설명드리겠습니다.
업로드 를 진행하고, 동작이 되는지 확인합니다.
정상적으로 작동된다면, 모터 방향도 한번 설정해보겠습니다.
모터 방향은 digitalWrite 를 이용하여, 모터 방향핀을 HIGH, LOW 로 바꿔줄 때마다 방향이 바뀌게 됩니다.
모터 핀 방향 |
PWM 값 |
모터 속도 |
|---|---|---|
HIGH |
0 / 255 |
최대속도 / 정지 |
LOW |
255 / 0 |
최대속도 / 정지 |
방향이 바뀔 때마다 PWM의 값의 범위도 바뀝니다.
모터 방향핀이 LOW일 경우 PWM 핀의 값이 255이면, 최대속도, 0이면 정지 입니다.
반대로 모터 방향핀이 HIGH 일 경우 PWM 핀의 값이 0이면, 최대속도, 255 면 정지 입니다.
1. A버튼을 눌렀을 경우 시계방향 회전
2. B버튼을 눌렀을 경우 반시계방향 회전
3. A,B 버튼 을 누르지 않았을 경우에는 모터 정지
※ 속도는 최대속도로 지정합니다.
위 기능이 되도록 아래 코드를 보지 않고서 코드를 작성해봅니다.
작성을 다하고, 아래 코드랑 비교해봅니다.
1void setup() {
2 // put your setup code here, to run once:
3 pinMode(8,INPUT_PULLUP);
4 pinMode(7,INPUT_PULLUP);
5
6 pinMode(5,OUTPUT);
7 pinMode(6,OUTPUT);
8 pinMode(10,OUTPUT);
9
10 pinMode(13,OUTPUT);
11
12 digitalWrite(5, HIGH);
13}
14
15void loop() {
16 // put your main code here, to run repeatedly:
17 if(digitalRead(8)==LOW)
18 {
19 digitalWrite(13,HIGH); //LED ON
20 digitalWrite(6,HIGH);
21 analogWrite(10,0);
22 }
23 else if(digitalRead(7)==LOW)
24 {
25 digitalWrite(13,LOW); //LED OFF
26 digitalWrite(6,LOW);
27 analogWrite(10,255);
28 }
29 else
30 {
31 digitalWrite(6,LOW);
32 analogWrite(10,0);
33 }
34}
이 모터를 작동시키는 것을 HIGH 일 때와 LOW 일 때가 다르므로, 이를 보고, 다루기 쉽도록 함수로 만들어 보겠습니다.
함수 코드만 살펴보면부분은
1// 방향을 알기 위한 true, false를 전처리문으로 선언 2#define EXT_DIR true 3#define REV_DIR false 4 5/* 6 * 방향과 속도를 정하여 모터를 작동시키는 함수, 0이면 정지, 255면 최대속도로 통일 7 */ 8void workMotor(int speed, bool dir) 9{ 10 if(dir==EXT_DIR) 11 { 12 digitalWrite(6, HIGH); 13 analogWrite(10, 255-speed); // HIGH일 경우 스피드를 반전 14 } 15 else if(dir==REV_DIR) 16 { 17 digitalWrite(6, LOW); 18 analogWrite(10,speed); 19 } 20}
전처리문으로 사용된 EXT_DIR, REV_DIR는 단순히 true와 false를 표시해주기 위함입니다. 실제로 true, false를 사용해도 문제는 없지만, 사용자가 보기 쉽고 이해하기 쉽도록 도와줍니다.
따라서 최종 코드는 다음과 같이 됩니다.
1// 방향을 알기 위한 true, false를 전처리문으로 선언
2#define EXT_DIR true
3#define REV_DIR false
4
5/*
6 * 방향과 속도를 정하여 모터를 작동시키는 함수, 0이면 정지, 255면 최대속도로 통일
7 */
8void workMotor(int speed, bool dir)
9{
10 if(dir==EXT_DIR)
11 {
12 digitalWrite(6, HIGH);
13 analogWrite(10, 255-speed); // HIGH일 경우 스피드를 반전
14 }
15 else if(dir==REV_DIR)
16 {
17 digitalWrite(6, LOW);
18 analogWrite(10,speed);
19 }
20}
21
22void setup() {
23 // put your setup code here, to run once:
24 pinMode(8,INPUT_PULLUP);
25 pinMode(7,INPUT_PULLUP);
26
27 pinMode(5,OUTPUT);
28 pinMode(6,OUTPUT);
29 pinMode(10,OUTPUT);
30
31 pinMode(13,OUTPUT);
32
33 digitalWrite(5, HIGH);
34}
35
36void loop() {
37 // put your main code here, to run repeatedly:
38 if(digitalRead(8)==LOW)
39 {
40 digitalWrite(13,HIGH); //LED ON
41 workMotor(255,EXT_DIR);
42 }
43 else if(digitalRead(7)==LOW)
44 {
45 digitalWrite(13,LOW); //LED OFF
46 workMotor(255,REV_DIR);
47 }
48 else
49 {
50 workMotor(0,REV_DIR); //정지 workMotor(0,EXT_DIR) 를 사용해도 가능
51 }
52}